




Tetherless Hovering Autonomous Underwater Vehicle
Autonomous. Customisable. Reliable.
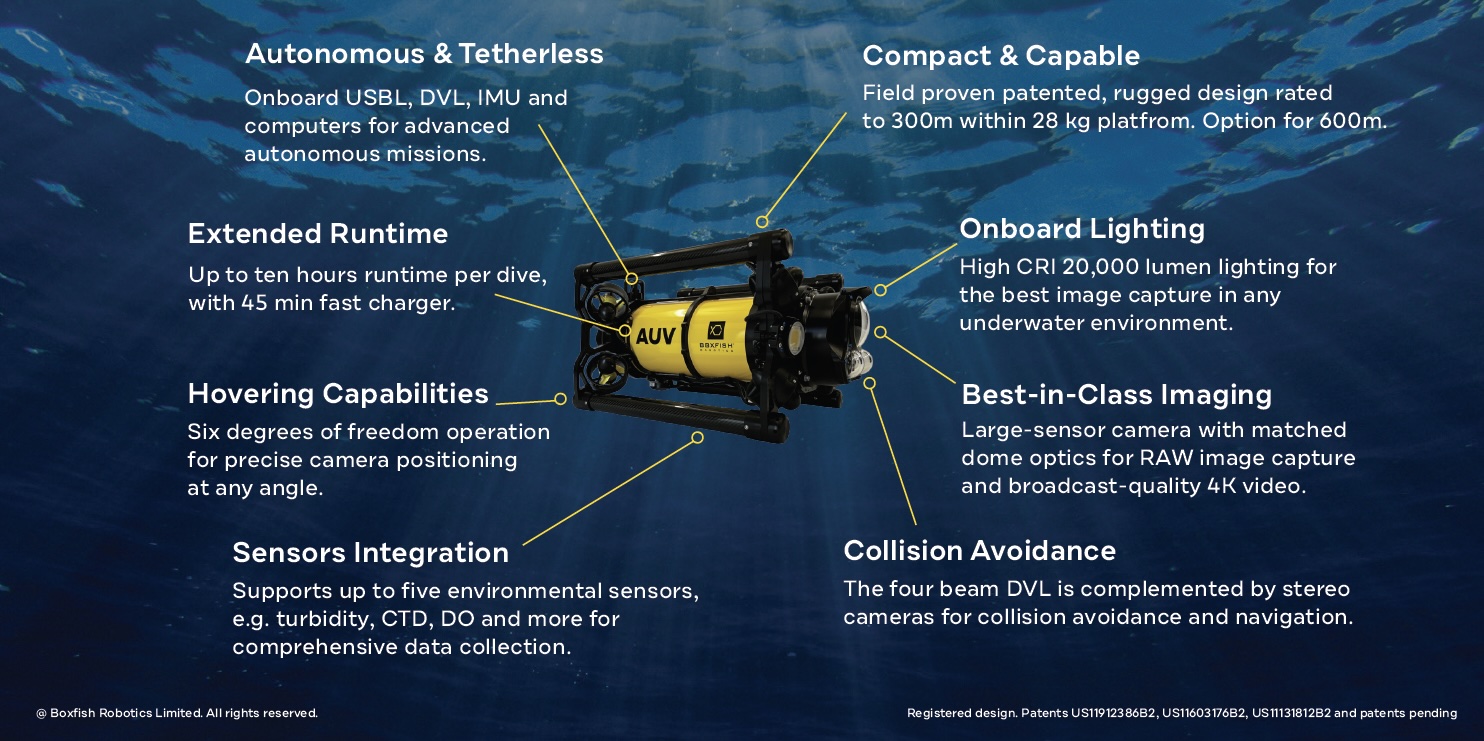
The Boxfish AUV represents our latest generation of tetherless hovering AUVs, offering six degrees of freedom operation and dynamic stabilisation. Available in 300m and 600m depth options.
It’s expandable architecture support both autonomous operation with option for fully manual tethered operation. The Boxfish AUV offering a range of up to 6km operation at one charge.
With the capacity for up to four free ports for connecting optional sonar and environmental sensors, the Boxfish AUV becomes a powerful scientific tool for repeatable autonomous inspection tasks.
The Boxfish AUV is ideal for
- Benthic surveys
- Coral reef monitoring
- Coral bleaching study
- Artificial reef monitoring
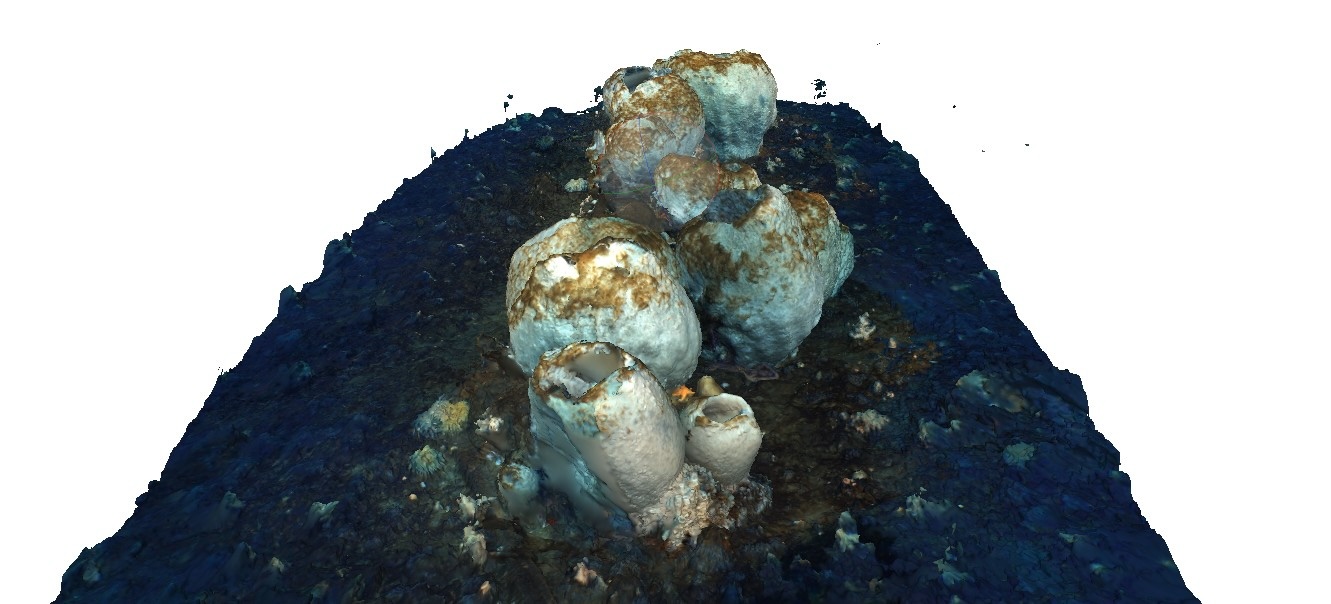
- Photogrammetry
- Seabed mapping
- Fish studies
- Invasive species studies
How It Works
The Boxfish AUV operates up to 600 meters underwater, using stereo cameras, USBL, IMU and DVL for precise navigation.
The combination of these sensors and proprietary autonomy algorithms allows precise and reliable mission execution in diverse environments.
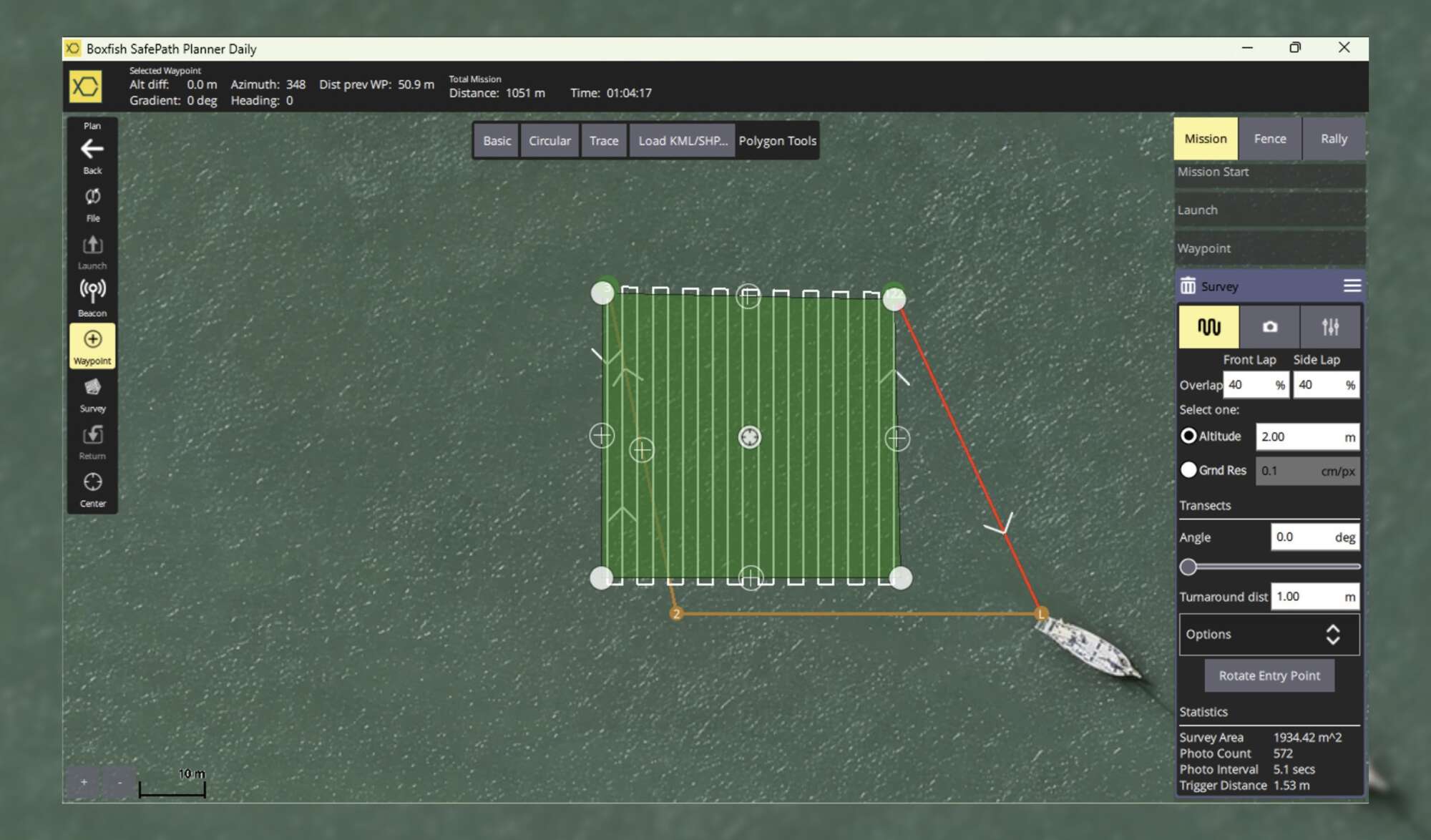
The Boxfish AUV’s mission planning software, Boxfish SafePath Planner, is the graphical user interface for setting up the mission. Users can create survey paths using waypoints, adjust vehicle pitch, speed, lighting, distance from objects, depth, and altitude at any waypoint.
The software supports grid patterns and simple transects, and missions can be saved for repetitive surveys.
Boxfish Commander software offers live updates on the AUV telemetry and mission progress, including the distance to the next waypoint.
Users can also monitor the AUV’s mission progress live on webpage and replay past missions for detailed analysis.
Boxfish AUV Features
Technical Specifications
General
- Presssure vessel material: Hard anodised aluminium alloy
- Dome Material: Acrylic
- Thruster layout: eight 3D vectored
- Manoeuvrability: 6 Degrees of Freedom
- Fault-tolerant design allows for continued operation even with a failed thruster
- Range up to 6km
- Depth rating: 300m or 600m
- Operating temperature: -10˚C to +45˚C
Camera system
Front triple camera head
-
Sony 4K main camera
- Stereo machine vision cameras
Lighting
- Forward: 20,000 lumens, high CRI, dimmable
- Adjustable arms and ball mounts for excellent lighting in all orientations
- Additional forward lighting options available
Physical Specifications
- Dimensions (l/w/h): 730mm / 435mm / 351mm
- Weight (salt water ballast installed): 25kg
Mission Planning Software
- Simple mission generation using grid pattern or simple transects
- Highly customisable interface (pitch, speed, lighting, distance from objects, depth, altitude at any waypoint and multiple USBL beacons)
- Start/Stop image collection, video capture, or sensor data at any waypoint
- Obstacle avoidance and backtracking
Power

- Dive time up to 10 hours (depending on conditions)
- Lithium polymer batteries
- Battery capacity: 600Wh
- Battery recharge time: 5 hrs standard or 45 min fast charge AC/DC field optional
Integrated sensors
-
Depth sensor
-
IMU
-
Internal pressure
-
Temperature and humidity monitoring
-
Battery voltage
-
Leak detection
-
Thruster failure detection
- USBL
- DVL
External connections
- Four Boxfish free standard ports
- Boxfish patented tether connector
- Network: RS232, RS422, RS485 and Ethernet
- Power: 12V @ 50W and 24V @ 50W
Optional add-ons
Navigation
- Oculus Imaging sonar (about multibeam sonar)
Environmental Sensors
- miniCTD
- pH sensor
- turbidity
- chlorophyll
- fluorometer
- hydrophone
Tether & reel (Optional)
- Extremely durable, lightweight fibre optic dia. diameter 2.7mm
- Tether length as required
- Neutrally buoyant in fresh water
Control station (Optional)
- 17” 4K primary monitor for real-time surface monitoring
- High quality, physical controls for all primary functions

Want to learn more about Boxfish AUV?
We can answer any questions you might have. Just fill in the form on our contact page and we’ll get back to you.